martes, 20 de diciembre de 2011
sábado, 8 de octubre de 2011
Teclado Matricial 4x4
{kind=link}
Es
un dispositivo de entrada que consiste en un arreglo matricial de 16
teclas (pulsadores). Dispone de un conector SIL (Single In Line) de 8
pines: 4 filas y 4 columnas. La interconexión de los pulsadores es como
se muestra en la imagen:

Cuando
se presiona una tecla se conecta una fila con una columna. La manera de
averiguar la tecla presionada consiste en enviar un nivel lógico a una
de las filas (diferente al nivel de las filas restantes) y buscar la
columna por la que se recibe el mismo nivel lógico. De esta manera se
obtiene la fila y columna al igual que en una matriz.
El diagrama de conexión típico al ATmega8 es el siguiente:

Las
resistencias de 1K son necesarias para evitar hacer un cortocircuito
accidental si se comparten los mismos pines del PIC con otro periférico,
como por ejemplo un Display o un LCD.
Las resistencias de 10K son necesarias para asegurar el nivel lógico 0 en las entradas del ATmega8.
Algoritmo de búsqueda:
- Los pines PD0-PD3 se configuran como Salidas. Los pines PD4-PD7 se configuran como Entradas.
- Las filas del teclado se conectan a los pines PD0-PD3 y las columnas a los pines PD4-PD7.
- Se envía “0” a todas las filas.
- Se envía “1” a la primera fila.
- Se verifica el nivel lógico en cada una de las columnas. Si se pulsó una tecla de la primera fila se obtendrá un “1” en la columna correspondiente.
- Si no se encuentra un “1” (no se pulsó tecla en la primera fila) se envía un “1” a la siguiente fila (a las filas restantes se envía “0”).
- Se verifican las columnas en busca del nivel lógico “1”.
- El procedimiento continúa hasta completar las 4 filas.
- Conociendo la fila por la que se envió “1” y conociendo la columna por la que se recibe “1” se puede conocer la tecla pulsada.
Programa Para ATmega8:
El
programa lee la tecla pulsada en un teclado matricial 4x4 y
simultáneamente muestra la última tecla pulsada en un display de 7
segmentos.
Diagrama de Conexión:

Programa en Assembler:
;---------------------------------------------------------
;Autor: LONELY113
; http://lonely113.blogspot.com
;
;Programa para control de teclado matricial 4x4
;Adicionalmente muestra la tecla pulsada en un display
;Para teclado: Salida: PD0-PD3
; Entradas: PD4-PD7
;Para Display: Salidas: PD1-PD7 (7 segmentos)
; PC0 (Habilitacion catodo comun)
;Oscilador interno de 8 MHz
;---------------------------------------------------------
.nolist
.include "m8def.inc"
.list
.device atmega8
.def KEY=r17
.def TEMP=r18
.def COUNT=r19
.def CHAR=r20
.def ROW=r21
.org 0x0000
; Inicializacion de stack
ldi r16,HIGH(RAMEND)
out SPH,r16
ldi r16,LOW(RAMEND)
out SPL,r16
; Fin inicializacion de Stack
; Inicio de programa
ldi r16,0x01
out DDRC,r16 ; PC0 como salida
ldi r16,0x0F
out DDRD,r16 ; PD7-PD4 como entradas, PD3-PD0 como salidas
sbi PORTC,0
clr TEMP
BEGIN: clr KEY
inc KEY
ldi ROW,0x01
out PORTD,ROW
KEY_V: nop
sbic PIND,4 ; Verifica tecla pulsada en columna 1
rjmp CON2 ; Ir a CON2 si se pulsa tecla
inc KEY ; Incrementar KEY si no se pulsa tecla
sbic PIND,5 ; Verifica tecla pulsada en columna 2
rjmp CON2 ; Ir a CON2 si se pulsa tecla
inc KEY ; Incrementar KEY si no se pulsa tecla
sbic PIND,6 ; Verifica tecla pulsada en columna 3
rjmp CON2 ; Ir a CON2 si se pulsa tecla
inc KEY ; Incrementar KEY si no se pulsa tecla
sbic PIND,7 ; Verifica tecla pulsada en columna 4
rjmp CON2 ; Ir a CON2 si se pulsa tecla
inc KEY ; Incrementar KEY si no se pulsa tecla
cpi KEY,0x11
brbs 1,CON1 ; Comprueba si llego a ultima tecla
lsl ROW
out PORTD,ROW
rjmp KEY_V
CON1: clr KEY
rjmp DISP
CON2: mov TEMP,KEY ; Retiene ultima tecla pulsada
DISP: ldi r16,0xFF
out DDRD,r16 ; PORTD como salida
rcall CONV
out PORTD,CHAR
cbi PORTC,0
nop
sbi PORTC,0
ldi r16,0x0F
out DDRD,r16 ; PD7-PD4 como entradas, PD3-PD0 como salidas
clr r16
out PORTD,r16
out PIND,r16
rjmp BEGIN
; Subrutinas
CONV: ldi ZH,HIGH(2*TABLE)
ldi ZL,LOW(2*TABLE)
add ZL,TEMP
lpm
mov CHAR,r0
ret
; Tabla de datos
TABLE:
.DB 0x00,0x0C,0xB6,0x9E,0xE2,0xCC,0xDA,0xFA,0xF2,0x0E,0xFE,0xDE,0xBC,0xEE,0x7E,0xF8,0x72
Archivos de Programa:
Multiplexaje de Display con Desplazamiento de Caracteres
Programa para ATmega8
El programa consiste en mostrar una serie caracteres en 4 display multiplexados.
los caracteres se muestran en grupos de 4 y se desplazan a la izquierda.
Diagrama de Conexión:

Funcionamiento:
Archivos de Programa:
Descargar
El programa consiste en mostrar una serie caracteres en 4 display multiplexados.
los caracteres se muestran en grupos de 4 y se desplazan a la izquierda.
Diagrama de Conexión:

Funcionamiento:
- Aplicando un procedimiento de multiplexaje se muestran los primeros 4 caraceres (CHAR1, CHAR2, CHAR3 y CHAR4).
- transcurrido un tiempo tal que el ojo pueda captar los caracteres se desplaza la cadena hacia la izquierda y se muestran los siguientes 4 caracteres (CHAR2, CHAR3, CHAR4, CHAR5).
- El programa comprueba si se mostraron todos los caracteres y cuando esto ocurre el proceso se repite.
;-----------------------------------------------------------
;Autor: LONELY113
; http://lonely113.blogspot.com
;
;Programa para multiplexar 4 display
;Muestra mensaje LONELY113 con desplazamiento a la izquierda
;Salidas: Puerto D (PD1-PD7) 7 segmentos de display
; Puerto A (PB0-PB3) habilitacion de display
;Tipo de display: Catodo comun
;Calibrado para oscilador interno de 8 MHz
;-----------------------------------------------------------
.nolist
.include "m8def.inc"
.list
.device atmega8
.def CHAR=r1
.def COUNT1=r20
.def COUNT2=r21
.def COUNT3=r22
.def TEMP=r18
.org 0x0000
;Inicializacion de Stack
ldi r16,HIGH(RAMEND)
out SPH,r16
ldi r16,LOW(RAMEND)
out SPL,r16
; Fin inicializacion de Stack
; Inicio de programa
ldi r16,0xFF
out DDRB,r16 ;PORTB como salida de habilitacion
ldi r16,0xFF
out DDRD,r16 ;PORTD como salida a displays
ldi r16,0x0F
out PORTB,r16 ;Deshabilitacion de displays
clr r16
out PORTD,r16
clr CHAR
ldi COUNT1,0xFF ; Inicia contadores
ldi COUNT2,0x20
ldi COUNT3,0x10
BEGIN: rcall CONVER
out PORTD,TEMP
cbi PORTB,3
nop ; Habilita display 4
sbi PORTB,3
inc CHAR
rcall CONVER
out PORTD,TEMP
cbi PORTB,2
nop ; Habilita display 3
sbi PORTB,2
inc CHAR
rcall CONVER
out PORTD,TEMP
cbi PORTB,1
nop ; Habilita display 2
sbi PORTB,1
inc CHAR
rcall CONVER
out PORTD,TEMP
cbi PORTB,0
nop ; Habilita display 1
sbi PORTB,0
ldi r16,0x03
sub CHAR,r16
dec COUNT1 ; Rutina de repeticion de
brne BEGIN ; visualizacion de los
ldi COUNT1,0xFF ; 4 caracteres
dec COUNT2
brne BEGIN
ldi COUNT1,0xFF
ldi COUNT2,0x20
dec COUNT3
brne BEGIN
ldi COUNT1,0xFF ; Reinicia contadores
ldi COUNT2,0x20
ldi COUNT3,0x10
inc CHAR ; 4 siguientes caracteres
ldi r16,0x0D
cp r16,CHAR
brne BEGIN
clr CHAR
rjmp BEGIN
; Subrutinas
CONVER: ldi ZH,HIGH(2*TABLE)
ldi ZL,LOW(2*TABLE)
add ZL,CHAR
lpm
mov TEMP,r0
ret
TABLE:
.DB 0x00,0x00,0x00,0x70,0x7E,0x6E,0xF3,0x70
.DB 0xDC,0x0C,0x0C,0x9E,0x00,0x00,0x00,0x00
Archivos de Programa:
Descargar
Multiplexaje de Display
Programa para ATmega8

Programa en Assembler:
Archivos de programa:
Descargar
El programa consiste en controlar la
visualización simultánea en 4 display cátodo común de 7 segmentos
utilizando el método de multiplexaje para optimizar el uso de pines del ATmega8 .
Diagrama de Conexión:
Funcionamiento:
- Se deshabilitan todos los displays (PB3-PB0=1111).
- Se envía dato a mostrar al Puerto D (PD1-PD7).
- Se habilita el display que mostrará el dato (Por ejemplo Display 1 a PB0=0).
- Se deshabilita Display (Por ejemplo Display 1 a PB0=1).
- Se envía nuevo dato al Puerto D.
- Se habilita el display que mostrará el dato.
- Se deshabilita el display.
- El procedimiento continúa hasta enviar 4 datos a los 4 displays.
- Todo el proceso se repite endefinidamente. El ojo humano no llega a notar el parpadeo de los displays pues ocurre a muy alta frecuencia, por lo tanto se percibe como si los 4 displays estuvieran iluminados y mostrando los 4 datos simultáneamente.
- El diagrama siguiente muestra el funcionamiento:

Programa en Assembler:
;-------------------------------------------------------
;Autor: LONELY113
; http://lonely113.blogspot.com
;
;Programa para multiplexar 4 display
;y mostrar el mensaje HOLA
;Salidas: Puerto D (PD1-PD7) 7 segmentos de display
; Puerto B (PB0-PB3) habilitacion de display
;Tipo de display: Catodo comun
;Oscilador interno de 8 MHz
;-------------------------------------------------------
.nolist
.include "m8def.inc"
.list
.device atmega8
.def TEMP=r17
.def DISP=r18
.org 0x0000
; Inicializacion de Stack
ldi r16,HIGH(RAMEND)
out SPH,r16
ldi r16, LOW(RAMEND)
out SPL,r16
; Fin inicializacion de Stack
; Inicio de programa
ldi r16,0x0F ; PORTB habilitacion de displays
out DDRB,r16 ; PB3-PB0
ldi r16,0xFF
out DDRD,r16 ; PORTB salida a displays
ldi r16,0x0F
out PORTB,r16 ; Deshabilita displays
BEGIN: ldi DISP,0x00
rcall CONVER
out PORTD,TEMP
cbi PORTB,3
nop
sbi PORTB,3
inc DISP
rcall CONVER
out PORTD,TEMP
cbi PORTB,2
nop
sbi PORTB,2
inc DISP
rcall CONVER
out PORTD,TEMP
cbi PORTB,1
nop
sbi PORTB,1
inc DISP
rcall CONVER
out PORTD,TEMP
cbi PORTB,0
nop
sbi PORTB,0
rjmp BEGIN
; subrutinas
CONVER: ldi ZH,HIGH(TABLE*2)
ldi ZL,LOW(TABLE*2)
add ZL,DISP
lpm
mov TEMP,r0
ret
; Tabla en memoria de programa
TABLE:
.DB 0xEC,0x7E,0x70,0xEE
Archivos de programa:
Descargar
Semáforo
Programa para ATmega8
Control de 2 semáforos.
-Uso de contadores
-Subrutina de retardo calibrado a 1 s para oscilador interno de 8 MHz
Diagrama de conexión:
 Funcionamiento:
Funcionamiento:

Programa en Assembler:
Archivos de programa:
Descargar
Control de 2 semáforos.
-Uso de contadores
-Subrutina de retardo calibrado a 1 s para oscilador interno de 8 MHz
Diagrama de conexión:

{kind=link}
La luz Verde dura 25 segundos.
La Luz Ámbar dura 5 segundos.
La Luz Roja dura 30 segundos.
- Se crea una variable TIME que se incrementa cada 1 segundo (calibrado mediante contadores para un cristal de 10 MHz).
- Se verifica la variable TIME para cambiar el estado de las luces según el siguiente diagrama:

;---------------------------------------------------------
;Autor: LONELY113
; http://lonely113.blogspot.com
;
;Programa de control de 2 semaforos
;Salidas: Puerto D (RD0-RD5)
; RD0=Verde1, RD1=Ambar1, RD2=Rojo1
; RD3=Verde2, RD4=Ambar2, RD5=Rojo2
;Para reloj interno de 8 MHz
;---------------------------------------------------------
.nolist
.include "m8def.inc"
.list
.device atmega8
.def COUNT1=r20
.def COUNT2=r21
.def COUNT3=r22
.def TIME=r4
.def STATE=r17
.org 0x0000
; Inicializacion de Stack
ldi r16,LOW(RAMEND)
out SPL,r16
ldi r16,HIGH(RAMEND)
out SPH,r16
; Fin inicializacion de Stack
; Inicio de programa
ldi r16,0xFF
out DDRD,r16 ; Puerto B como salida
clr TIME
BEGIN: ldi r16,0x00 ; 00 segundos
cp r16,TIME
brbs 1,FIRST
ldi r16,0x19 ; 25 segundos
cp r16,TIME
brbs 1,SECOND
ldi r16,0x1E ; 30 segundos
cp r16,TIME
brbs 1,THIRD
ldi r16,0x37 ; 55 segundos
cp r16,TIME
brbs 1,FOURTH
rjmp FINISH
FIRST: ldi STATE,0x21 ; '00100001'b
out PORTD,STATE
rjmp FINISH
SECOND: ldi STATE,0x22 ; '00100010'b
out PORTD,STATE
rjmp FINISH
THIRD: ldi STATE,0x0C ; '00001100'b
out PORTD,STATE
rjmp FINISH
FOURTH: ldi STATE,0x14 ; '00010100'b
out PORTD,STATE
FINISH: nop
rcall DELAY
rjmp BEGIN
; Subrutinas
DELAY: ldi COUNT1,0xFF ; Retardo de 1 segundo
ldi COUNT2,0xFF
ldi COUNT3,0x29
LOOP: dec COUNT1
brne LOOP
ldi COUNT1,0xFF
dec COUNT2
brne LOOP
ldi COUNT1,0xFF
ldi COUNT2,0xFF
dec COUNT3
brne LOOP
inc TIME
ldi r16,0x3C ; reiniciar en 60 segundos
cp r16,TIME
brne RETURN
clr TIME
RETURN: ret
Archivos de programa:
Descargar
Selección de Código Binario y Visualización
Programa para ATmega8
Monitorea la entrada de un código binario (4 bits) y muestra la selección en decimal mediante un display.
-Aplicación de Tabla de datos para conversión Hexadecimal a 7 segmentos
Diagrama de conexión:

Programa en Assembler:
Archivos de Programa:
Descargar
Monitorea la entrada de un código binario (4 bits) y muestra la selección en decimal mediante un display.
-Aplicación de Tabla de datos para conversión Hexadecimal a 7 segmentos
Diagrama de conexión:

Programa en Assembler:
;---------------------------------------------------------
;Autor: LONELY113
; http://lonely113.blogspot.com
;
;Programa que muestra codigo seleccionado en binario
;en un display catodo comun de 7 segmentos
;Entradas: Puerto B (Pines PB0-PB3)
;Salidas: Puerto D (Pines PD1-PD7)
;Oscilador interno de 8 MHz
;---------------------------------------------------------
.nolist
.include "m8def.inc"
.list
.device atmega8
.org 0x0000
;Definicion de stack
ldi r25,HIGH(RAMEND)
out SPH,r25
ldi r25,LOW(RAMEND)
out SPL,r25
;fin definicion de stack
BEGIN: ldi r18,0x00 ;RB7-RB0 como entradas
out DDRB,r18
ldi r18,0xFF ;RD7-RD0 como salidas
out DDRD,r18
LOOP: in r17,PINB
andi r17,0x0F
rcall SAVE
out PORTD,r16
rjmp LOOP
;Subrutinas
SAVE: ldi ZH,HIGH(2*TABLA)
ldi ZL,LOW(2*TABLA)
add ZL,r17
lpm
mov r16,r0
ret
;Tabla de conversion hex a 7 segmentos
TABLA:
.DB 0x7E,0x0C,0xB6,0x9E,0xCC,0xDA,0xFA,0x0E
.DB 0xFE,0xDE,0xEE,0xF8,0x72,0xBC,0xF2,0xE2
;Fin de tabla
Archivos de Programa:
Descargar
Luz Secuencial
Programa para ATmega8
Desplaza una luz en el Puerto B de derecha a izquierda y de izquierda a derecha.
-Comandos de rotación LSL y LSR
-Subrutina de retardo
-Calibrado para cristal interno de 8 MHZ
Esquema de conexión:

Programa en Assembler:
Archivos de programa:
Descargar
Desplaza una luz en el Puerto B de derecha a izquierda y de izquierda a derecha.
-Comandos de rotación LSL y LSR
-Subrutina de retardo
-Calibrado para cristal interno de 8 MHZ
Esquema de conexión:

Programa en Assembler:
;----------------------------------------------------------- ;Autor: LONELY113 ; http://lonely113.blogspot.com ; ;Programa para desplazamiento de luz en el puerto B ;Desplazamiento cada 1 s (Para oscilador interno de 8 MHz). ;Salidas: Puerto B (PB0-PB7) ;----------------------------------------------------------- ;Para reloj interno de 8 MHz .nolist .include "m8def.inc" .list .device atmega8 .org 0x0000 .def COUNT1=r20 .def COUNT2=r21 .def COUNT3=r22 .def NUMBER=r4 .def TEMP=r17 ; Inicializacion de stack ldi r16,LOW(RAMEND) out SPL,r16 ldi r16,HIGH(RAMEND) out SPH,r16 ; Fin inicializacion de stack ; Inicio de programa ldi r16,0xFF ; Puerto B como salida out DDRB,r16 clr r16 out PORTB,r16 ; Borrar PORTB ldi r16,0x07 mov NUMBER,r16 ; Desplazar 7 posiciones ldi TEMP,0x01 ; '00000001'b out PORTB,TEMP FIRST: rcall DELAY lsl TEMP out PORTB,TEMP dec NUMBER brne FIRST ; Desplaza 7 veces a la izquierda ldi r16,0x07 mov NUMBER,r16 SECOND: rcall DELAY lsr TEMP out PORTB,TEMP dec NUMBER brne SECOND ; Desplaza 7 veces a la derecha ldi r16,0x07 mov NUMBER,r16 rjmp FIRST ; Bucle infinito ; Subrutinas DELAY: ldi COUNT1,0xFF ; Retardo de 1 segundo ldi COUNT2,0xFF ldi COUNT3,0x29 LOOP: dec COUNT1 brne LOOP ldi COUNT1,0xFF dec COUNT2 brne LOOP ldi COUNT1,0xFF ldi COUNT2,0xFF dec COUNT3 brne LOOP ret
Archivos de programa:
Descargar
lunes, 29 de agosto de 2011
Inversor Señal Sinusoidal
Este proyecto consiste en obtener una señal sinusoidal a partir de un voltaje DC bipolar.
El funcionamiento se fundamenta en una modulación SPWM que se obtiene mediante un microcontrolador.

ETAPAS
Circuito de control:
El circuito de control se implementa con un microcontrolador ATmega8. Genera dos señales SPWM desfasadas como se muestra en la figura. El programa está ajustado para que la señal sinusoidal de salida sea de 60 Hz.

Circuito de Aislamiento Control - Potencia:
Se utilizan dos optoacopladores 4N35 en la configuración que se muestra en la imagen. Notar que se requieren dos fuentes DC adicionales de 5V con tierras separadas (Señales de control independientes) Se puede obtener mediante un transformador de múltiples salidas, rectificadores y filtros.

Circuito de Potencia:
Se utilizan transistores NMOS como conmutadores de alta potencia. Se puede utilizar tiembién IGBT. También se requiere un filtro pasabajos con frecuencia de corte mayor a 60 Hz. No se requiere que sea de alta pendiente, pues la mosulación utilizada, SPWM, hace que los armónicos se encuentren muy alejados de la frecuencia fundamental.

Fuente Bipolar:
Como se observa en el circuito anterior, se requiere una fuente bipolar del voltaje deseado, en este caso 145 V. Se puede utilizar un tranformador o se puede tomar directamente de la red con el circuito que se muestra a continuación:
 Funcionamiento
Funcionamiento
Modulación PWM

Señales de control

Señal de salida sin filtro

Señal de salida filtrada

Programa en Basic
Descargar
El funcionamiento se fundamenta en una modulación SPWM que se obtiene mediante un microcontrolador.

ETAPAS
Circuito de control:
El circuito de control se implementa con un microcontrolador ATmega8. Genera dos señales SPWM desfasadas como se muestra en la figura. El programa está ajustado para que la señal sinusoidal de salida sea de 60 Hz.

Circuito de Aislamiento Control - Potencia:
Se utilizan dos optoacopladores 4N35 en la configuración que se muestra en la imagen. Notar que se requieren dos fuentes DC adicionales de 5V con tierras separadas (Señales de control independientes) Se puede obtener mediante un transformador de múltiples salidas, rectificadores y filtros.

Circuito de Potencia:
Se utilizan transistores NMOS como conmutadores de alta potencia. Se puede utilizar tiembién IGBT. También se requiere un filtro pasabajos con frecuencia de corte mayor a 60 Hz. No se requiere que sea de alta pendiente, pues la mosulación utilizada, SPWM, hace que los armónicos se encuentren muy alejados de la frecuencia fundamental.

Fuente Bipolar:
Como se observa en el circuito anterior, se requiere una fuente bipolar del voltaje deseado, en este caso 145 V. Se puede utilizar un tranformador o se puede tomar directamente de la red con el circuito que se muestra a continuación:
 Funcionamiento
Funcionamiento
Modulación PWM

Señales de control

Señal de salida sin filtro

Señal de salida filtrada

Programa en Basic
$regfile = "m8def.dat" 'Microcontrolador ATmega8 $crystal = 8000000 'Reloj 8 MHz $hwstack = 32 'Hardware Stack $swstack = 10 'Software Stack Config Portb = Output 'Puerto B como salida 'Configuración del módulo PWM Config Timer1 = Pwm , Pwm = 10 , Compare A Pwm = Clear Down , Compare B Pwm = Clear Down , Prescale = 1 'Variables Dim T As Single 'Tiempo Dim D As Single Dim Duty As Word 'Duty cycle (Word) 'Inicio de programa T = 0 'Reinicialización de variables Loop1: 'Bucle infinito Do If T < 0.00833 Then 'Para semiciclo positivo D = T * 376.992 'Tiempo a radianes D = Sin(d) 'Valor senoidal entre 0 - 1 Duty = D * 1023 Pwm1a = Duty 'señal PWM1 con Duty Cycle calculado Pwm1b = 0 'Señal PWM2=0 T = T + 0.0006 'Incrementar T1 en 0.6 ms Elseif T < 0.01666 Then 'Para el semiciclo negativo D = T * 376.992 'Tiempo a radianes D = Sin(d) 'Valor senoidal entre 0 - 1 D = D * -1 Duty = D * 1023 Pwm1a = 0 'Señal PWM1=0 Pwm1b = Duty 'Señal PWM2 con duty cicle calculado T = T + 0.0006 'Incrementar T en 0.6 ms Else 'reiniciar si se completaron los dos ciclos T = 0 End If Loop End
Descargar
Arreglo de SCR como Triac
El siguiente proyecto consiste en implementar el funcionamiento de un Triac mediante 2 SCR con la finaliadad de poder manejar mayor potencia de la que permiten los Triac.
ETAPAS
Circuito de Control:
Para el disparo de los Triac se utiliza el microntrolador Atmega8 programado en lenguaje Basic. Para introducir el ángulo de disparo deseado se utiliza un portenciómetro conectado a un ADC. El ángulo de disparo va de 0º a 180º correspondiente a un semiciclo. El otro semicilo es simétrico.

Detector de Cruce por Cero:
Se utiliza este bloque de circuito para poder sincronizar el programa con la señal senoidal de potencia que se quiere controlar. Este circuito enviará un pulso de interrupción cuando la señal cruce por 0, iniciando la rutina correspondiente en el programa.

Aislamiento Control - Potencia:
Se utiliza un optoacoplador 4N35, con la configuración mostrada en la imagen.

Circuito de Potencia:
la configuración de los SCR es como se muestra en la imagen. Esta configuración (2 SCR y 2 Diodos) permite tener un un punto común, utilizada como GND, a diferencia de conectar sólo dos SCR en antiparalelo en el que se requeriría dos señales de control con tierras separadas.

Circuito Completo:

Programa en lenguaje Basic:
Generación de pulsos de interrupción:
 Señal en la carga:
Señal en la carga:
 Descargar
Descargar
{kind=link}
ETAPAS
Circuito de Control:
Para el disparo de los Triac se utiliza el microntrolador Atmega8 programado en lenguaje Basic. Para introducir el ángulo de disparo deseado se utiliza un portenciómetro conectado a un ADC. El ángulo de disparo va de 0º a 180º correspondiente a un semiciclo. El otro semicilo es simétrico.

Detector de Cruce por Cero:
Se utiliza este bloque de circuito para poder sincronizar el programa con la señal senoidal de potencia que se quiere controlar. Este circuito enviará un pulso de interrupción cuando la señal cruce por 0, iniciando la rutina correspondiente en el programa.

Aislamiento Control - Potencia:
Se utiliza un optoacoplador 4N35, con la configuración mostrada en la imagen.

Circuito de Potencia:
la configuración de los SCR es como se muestra en la imagen. Esta configuración (2 SCR y 2 Diodos) permite tener un un punto común, utilizada como GND, a diferencia de conectar sólo dos SCR en antiparalelo en el que se requeriría dos señales de control con tierras separadas.

Circuito Completo:

Programa en lenguaje Basic:
$regfile = "m8def.dat" 'Microcontrolador Atmega8 $crystal = 8000000 'Reloj interno 8 MHz $hwstack = 32 'Hardware Stack $swstack = 10 'Software Stack Config Portb = Output 'Puerto B como salida 'variables Dim D As Word 'Variable para lectura de potenciómetro Dim T As Single 'Variable para cálculos Dim Rampa As Single 'Señal rampa 'configuracion ADC Config Adc = Single , Prescaler = Auto 'configuracion de interrupciones Config Int0 = Low Level 'Int. externa. Flanco de bajada Enable Int0 On Int0 Int_zc Config Timer1 = Timer , Prescale = 256 'Int. por comparación 31.25 KHz On Compare1a Int_timer1 Enable Compare1a Enable Interrupts 'Habilitación de interrupciones Timer1 = 0 'Reinicialización de contador Compare1a = 1 'Interrupción cada 32 us Stop Timer1 Rampa = 0 'Reiniciar Rampa 'Programa principal Do nop Loop 'Interrupcion cruce por cero Int_zc: Stop Timer1 'Deterner contador Timer1 = 0 'Reinicializar contador Rampa = 0 Portb.0 = 0 'Desactivar SCR Start Adc D = Getadc(0) 'Leer dato ADC (Potenciómetro) Stop Adc T = D / 1023 T = T * 360 'Rango 0 - 360 => precisión 0.5 grados. Start Timer1 Return 'Interrupción por comparación Int_timer1: Timer1 = 0 Rampa = Rampa + 2.8 'Incrementar rampa en 2.8 If T > Rampa Then Portb.0 = 0 'Desactivar SCR mientras Rampa < T Else Portb.0 = 1 'Activar SCR si Rampa > T End If Return 'Retorno de interrupción EndFuncionamiento
Generación de pulsos de interrupción:
 Señal en la carga:
Señal en la carga:
 Descargar
Descargar
lunes, 8 de agosto de 2011
sábado, 23 de julio de 2011
Placa de entrenamiento PIC18F4550
Placa de entrenamiento para microcontrolador PIC18F4550.
 Incluye:
Incluye:
Descargar

- Conector ICSP 6 pines para programación.
- Conector Para USART.
- Conector USB tipo B.
- Pines de puertos I/O (2 x pin).
- Cristal.
- Botón de reset.
- Regulador 5 V.
- Pines VDD/GND (4).
- Switch ON/OFF (Push de 6 pines).
- VDD regulador o puerto USB.
Descargar
Programador Pickit 2 Clone
Programador de Pic por USB (Pickit 2 clone)
-Pic 5V
-8/14/18/28/40 pines
-Memorias 24C
Probado con 16F84A / 16F877A / 18f2550 / 18f4550.
Para Programar el PIC18F2550 se utilizó el programador por puerto serial.
Firmware v2.32 y Software Pickit 2 v2.61 disponibles en la página de Microchip.

Esquema Listo para imprimir y lista de componentes:
Pickit 2 Clone
-Pic 5V
-8/14/18/28/40 pines
-Memorias 24C
Probado con 16F84A / 16F877A / 18f2550 / 18f4550.
Para Programar el PIC18F2550 se utilizó el programador por puerto serial.
Firmware v2.32 y Software Pickit 2 v2.61 disponibles en la página de Microchip.
{kind=link}

Esquema Listo para imprimir y lista de componentes:
Pickit 2 Clone
viernes, 13 de mayo de 2011
Gráfico de señales eviadas por PIC16F877a en Hp50g
El siguiente programa consiste en:
1. Muestrear una señal analógica de 0 a 5 V con periodo de muestreo
de 1 segundo por 1 minuto.
2. Convertir las muestras analógicas a digitales.
3. Enviar las muestras digitales a la calculadora HP50g. Transmisión en serie.
4. Convertir las muestras digitales a valores analógicos correspondientes 0-5 V.
5.Graficar la señal continua en tiempo discreto(cada segundo).
En el PIC16F877a
1. La señal analógica se muestrea y se digitaliza utilizando el módulo ADC.
- Periodo de muestro=1 s
- 8 bits/muestra
2. Al completarse 60 muestras se pasa a otra rutina de envio de datos por
USART.
- 9600 baudios
- 8 bits de datos
- 2 bit Stop
- No paridad
3. Se enciende un Led por 0.5 s indicando transferencia completa.
4. En seguida se toman muestras nuevamente por 1 minuto.
En la calculadora HP50g
1. Los datos se reciben en la HP50g en forma de cadena.
2. La cadena se separa en caracteres utilizando los comandos HEAD y TAIL.
3. Los caracteres se convierten a valores numéricos (0 - 255) utilizando el
comando NUM.
4. Los números obtenidos se agrupan en una matríz 1x60.
5. Se convierten los valores digitales a los analógicos correspondientes (0- 5V).
6. Se genera una matríz [0 1 2 ... 59] 1x60 (base de tiempo).
7. La matríz de datos y la matríz base de tiempo forman una matríz 60x2 con los
comandos AUGMENT y TRAN.
8. Se grafica las muestras (Dispersión) con el comando SCATTER.
9. Se unen los puntos graficados con líneas para un gráfico continuo con el
comando LINE.
Esquema de circuito:

Programa para PIC16F877a en Pic Basic (Microcode)
Programas para HP50g en UserRPL
Capturas en pantalla de Hp50g:


Programas *.BAS y HP UserRPL:
Descargar
1. Muestrear una señal analógica de 0 a 5 V con periodo de muestreo
de 1 segundo por 1 minuto.
2. Convertir las muestras analógicas a digitales.
3. Enviar las muestras digitales a la calculadora HP50g. Transmisión en serie.
4. Convertir las muestras digitales a valores analógicos correspondientes 0-5 V.
5.Graficar la señal continua en tiempo discreto(cada segundo).
En el PIC16F877a
1. La señal analógica se muestrea y se digitaliza utilizando el módulo ADC.
- Periodo de muestro=1 s
- 8 bits/muestra
2. Al completarse 60 muestras se pasa a otra rutina de envio de datos por
USART.
- 9600 baudios
- 8 bits de datos
- 2 bit Stop
- No paridad
3. Se enciende un Led por 0.5 s indicando transferencia completa.
4. En seguida se toman muestras nuevamente por 1 minuto.
En la calculadora HP50g
1. Los datos se reciben en la HP50g en forma de cadena.
2. La cadena se separa en caracteres utilizando los comandos HEAD y TAIL.
3. Los caracteres se convierten a valores numéricos (0 - 255) utilizando el
comando NUM.
4. Los números obtenidos se agrupan en una matríz 1x60.
5. Se convierten los valores digitales a los analógicos correspondientes (0- 5V).
6. Se genera una matríz [0 1 2 ... 59] 1x60 (base de tiempo).
7. La matríz de datos y la matríz base de tiempo forman una matríz 60x2 con los
comandos AUGMENT y TRAN.
8. Se grafica las muestras (Dispersión) con el comando SCATTER.
9. Se unen los puntos graficados con líneas para un gráfico continuo con el
comando LINE.
Esquema de circuito:

Programa para PIC16F877a en Pic Basic (Microcode)
'****************************************************************
'* Name : graficar_hp50g.BAS *
'* Author : LONELY113 *
'* Notice : Copyright (c) 2011 LONELY113 *
'* : All Rights Reserved *
'* Date : 13/05/2011 *
'* Version : 1.0 *
'* Notes : PIC16F877a *
'* : 9600 baudios con cristal de 10 MHz *
'* : Pin RC6/Tx a pin RxD de Hp50g *
'* : Pin GND de Hp50g a GND de circuito *
'* : Requiere adaptador de nivel 5V a 3.3V *
'* : Led en Pin RB4 *
'****************************************************************
@ __CONFIG _WDT_OFF & _PWRTE_OFF & _CP_OFF & _HS_OSC & _BODEN_OFF & _LVP_OFF
DEFINE OSC 10 ; 10 MHz
'Definiciones USART
DEFINE HSER_RCSTA 90h ' Habilitar registro de recepción
DEFINE HSER_TXSTA 20h ' Habilitar registro de trsnsmisión
DEFINE HSER_BAUD 9600 ' 9600 baudios
'Definiciones ADC
DEFINE ADC_BITS 8 ' Número de bits/muestra
DEFINE ADC_CLOCK 3 ' Fuente de reloj (RC=3)
DEFINE ADC_SAMPLEUS 50 ' Periodo de muestreo en us
TRISB.4=0 'Pin RB4 como salidai VAR BYTE
volt VAR BYTE 'Variable que almacena temporalmente una muestra
signal VAR BYTE[60] 'Variable que almacena 60 muestras
TRISA = 255 'Puerto A como entradas
ADCON1 = 2 'PORTA analógico
PAUSE 5000 'Retardo de 5 segundos
'Inicio de programa
loop1:
FOR i=0 TO 59
ADCIN 0, volt 'Muestrea y guarda en volt
signal[i]= volt 'signal almacena todas las muestras
PAUSE 1000 'Muestrear cada segundo
NEXT
HSEROUT [STR signal \60] 'Enviar cadena por Tx
PORTB.4=1 'Encender LED (envio completo)
PAUSE 500
PORTB.4=0 'Apagar LED
GOTO loop1
END
Programas para HP50g en UserRPL
Configurar puerto serie
Graficar señal
@Configuracion puerto serie
<<
9600 BAUD 0 PARITY
-33 CF -78 SF
CLOSEIO OPENIO 1 STIME
>>
Graficar señal
<<
{X1 X2 Y1 Y2 j1 j2 m n DATA} PURGE
@Leer datos de Buffer
BUFLEN
DROP SRECV DROP
@guardar datos en matriz fila
DATA STO
DATA
1 60
FOR i
DUP HEAD NUM SWAP TAIL
NEXT
DROP 60 ROW→
@Convertir a niveles analogicos 0-5V
255 / 5 *
@Generar una matriz fila [0 1 2 ...59]
1 60
FOR i
i 1 -
NEXT
60 ROW→
@Formar una matriz 60x2 datos y base de tiempo
SWAP AUGMENT TRAN
DUP 'DATA' STO
@Graficar muestras (dispersion)
ΣDAT STO
ERASE SCATTER AUTO DRAX DRAW
@Unir puntos (grafica continua)
DATA SIZE {m n} STO
1 m 1 -
FOR j1
j1 1 + 'j2' STO
DATA {j1 1} GET 'X1' STO
DATA {j1 2} GET 'Y1' STO
DATA {j2 1} GET 'X2' STO
DATA {j2 2} GET 'Y2' STO
X1 Y1 R→C X2 Y2 R→C LINE
NEXT
PICTURE
{X1 X2 Y1 Y2 j1 j2 m n ΣDAT ΣPAR PPAR} PURGE
>>
Capturas en pantalla de Hp50g:
Programas *.BAS y HP UserRPL:
Descargar
lunes, 2 de mayo de 2011
Placa de entrenamiento PIC16F877A
Placa de entrenamiento para microcontrolador PIC16F877A.
 Incluye:
Incluye:
Descargar

{kind=link}
- Conector ICSP 6 pines para programación.
- Conector Para USART.
- Pines de puertos I/O (2 x pin).
- Cristal.
- Botón de reset.
- Regulador 5 V.
- Pines VDD/GND (4).
- Switch ON/OFF (Push de 6 pines).
Descargar
viernes, 29 de abril de 2011
Placa de entrenamiento ATmega8

Placa de entrenamiento para microcontrolador ATmega8.
Incluye:
- Conector IDC 2x5 pines para programación.
- Pines de puertos I/O (2 x pin).
- Cristal externo.
- Botón de reset.
- Regulador 5 V.
- Pines VDD/GND (4).
- Pin AREF (opcional 5 V).
Descargar
viernes, 22 de abril de 2011
Programador AVR USBASP
Programador de AVR USBASP con ATmega8

Se requiere programar el ATmega8 previamente usando otro programador como puede ser el programador serial junto con Ponyprog2000.
Configuración de fusibles:
firmware, Driver para windows XP:
Descargar
Driver para Windows 7 - 32 / 64 bit:
Descargar
Layout listo para imprimir y lista de componentes:
Descargar

Se requiere programar el ATmega8 previamente usando otro programador como puede ser el programador serial junto con Ponyprog2000.
Configuración de fusibles:
HFUSE=0xc9 LFUSE=0xef
firmware, Driver para windows XP:
Descargar
Driver para Windows 7 - 32 / 64 bit:
Descargar
Layout listo para imprimir y lista de componentes:
Descargar
Programador AVR Serial
Programdor AVR por puerto serial.

Layout listo para imprimir y lista de componentes:
Descargar
- Usar con Ponyprog2000: www.lancos.com/prog.html
- Requiere fuente externa de 5V. Conectar entre VDD y GND.

Layout listo para imprimir y lista de componentes:
Descargar
lunes, 11 de abril de 2011
Envio de caracteres de PIC16F877A a calculadora HP50g
Programa para PIC16F877A
Este programa envía una cadena de 10 caracteres a 9600 baudios utilizando transmisión USART.

Funcionamiento
0 PARITY
-33 CF
-78 SF
CLOSEIO
OPENIO
10 STIME
BUFLEN
DROP
SRECV
DROP
>>
Archivos .ASM y .HEX
Descargar
****Programa en Pic Basic (Microcode)****
Este programa envía una cadena de 10 caracteres a 9600 baudios utilizando transmisión USART.

Funcionamiento
- Los datos a enviar se encuentran en una tabla de datos en la memoria de programa, en este caso una cadena de 10 caracteres "HOLA MUNDO".
- Se configura el microcontrolador para transmisión serial asíncrona a 9600 baudios (mayor detalle en el archivo . ASM).
- El programa incluye una rutina de retardo antes de enviar los caracteres para poder inicializar la configuración en la calculadora HP50g.
- Se puede conectar un led en el pin RA0. Cuando se conecta la alimentación al pic el led se enciende y se ejecuta la rutina de retardo. Finalizada ésta el led se apaga indicando el inicio de la transmisiñon de datos.
- Los carateres se envian y se almacenan automáticamente en el buffer de entrada de la HP50g una vez abierto el puerto serial con el comando OPENIO.
- El circuito formado por los transistores 2N2222A es un adaptador de nivel de tensión. El PIC trabaja a 0 - 5 V pero la calculadora opera 0 - 3.3 V.
- Crear el siguiente programa en la calculadora y almacenar en una variable. Ejecutar una vez que se conecta la alimetación al PIC16F877A o luego de resetearlo.
0 PARITY
-33 CF
-78 SF
CLOSEIO
OPENIO
10 STIME
BUFLEN
DROP
SRECV
DROP
>>
Archivos .ASM y .HEX
Descargar
****Programa en Pic Basic (Microcode)****
'****************************************************************
'* Name : UNTITLED.BAS *
'* Author : LONELY113 *
'* Notice : Copyright (c) 2011 LONELY113 *
'* : All Rights Reserved *
'* Date : 12/05/2011 *
'* Version : 1.0 *
'* Notes : PIC16F877a *
'* : 9600 baudios con cristal de 10 MHz *
'* : Pin RC6/Tx a pin RxD de Hp50g *
'* : Pin GND de Hp50g a GND de circuito *
'* : Requiere adaptador de nivel 5V a 3.3V *
'****************************************************************
@ __CONFIG _WDT_OFF & _PWRTE_OFF & _CP_OFF & _HS_OSC & _BODEN_OFF & _LVP_OFF
DEFINE OSC 10 '10 MHz
'Definiciones para USART
DEFINE HSER_RCSTA 90h 'Habilitar registro de recepción
DEFINE HSER_TXSTA 20h 'Habilitar registro de transmisión
DEFINE HSER_BAUD 9600 '9600 baudios
'Inicio de programa
PAUSE 5000 'Retardo de 5 segundos
HSEROUT ["Hola Mundo!!!!!!",13,10] 'Enviar cadena
END
viernes, 8 de abril de 2011
Envio de cadena de caracteres de hp50g a PIC16F877A
Programa para PIC16F877A
Estos dos programas cumplen la misma función que los publicados anteriormente. La diferencia es que se aprovecha la comunicación USART de la que dispone el pic16f877a.
Envio de caracter y visualización en Leds (ASCII)
 Funcionamiento
Funcionamiento
El caracter se recibe en el registro RCREG, se mueve al acumulador y se envia al Puerto D para la visualización.
Envio de una cadena de 16 caracteres

Funcionamiento
Envio de caracter
Envio de cadena
Programa para hp50g:
<< 'a' PURGE
1 10
FOR j
"CADENA A ENVIAR"
{":a:" {0 0} V}
INPUT
****Programa en Pic Basic (Microcode)****
Estos dos programas cumplen la misma función que los publicados anteriormente. La diferencia es que se aprovecha la comunicación USART de la que dispone el pic16f877a.
Envio de caracter y visualización en Leds (ASCII)

El caracter se recibe en el registro RCREG, se mueve al acumulador y se envia al Puerto D para la visualización.
Envio de una cadena de 16 caracteres

Funcionamiento
- Se genera una interrupción cada vez que se recibe un caracter.
- La rutina de interrupción guarda los caracteres recibidos en posiciones de memoria sucesivas, mediante direccionamiento indirecto, hasta que se reciben 16 caracteres.
- Una vez recibidos 16 caracteres se pasa a la rutina de visualización en LCD, finalizada ésta se reinicia el programa a la espera de una nueva cadena.
Envio de caracter
Envio de cadena
Programa para hp50g:
<< 'a' PURGE
1 10
FOR j
"CADENA A ENVIAR"
{":a:" {0 0} V}
INPUT
OBJ→ 'a' STO a
9600 BAUD
XMIT
DROP
NEXT
'a' PURGE >>
****Programa en Pic Basic (Microcode)****
'****************************************************************
'* Name : UNTITLED.BAS *
'* Author : LONELY113 *
'* Notice : Copyright (c) 2011 LONELY113 *
'* : All Rights Reserved *
'* Date : 12/05/2011 *
'* Version : 1.0 *
'* Notes : PIC16F877a *
'* : Pines de LCD: RD7-RD4=D7-D4 (Modo de 4 bits) *
'* : RB0=RS, RB1=RW, RB2=E *
'* : Pin RC7/Rx=TxD de Hp50g *
'* : unir GND de Hp50g a GND de circuito *
'* : Requiere adaptador de nivel 5V a 3.3V *
'****************************************************************
@ __CONFIG _WDT_OFF & _PWRTE_OFF & _CP_OFF & _HS_OSC & _BODEN_OFF & _LVP_OFF
DEFINE OSC 10 '10 MHz
'Definiciones para módulo LCD
DEFINE LCD_BITS 4 'Bus de 4 bits
DEFINE LCD_LINES 2 'LCD de 2 filas
DEFINE LCD_DREG PORTD 'Puerto de datos a LCD
DEFINE LCD_DBIT 4 'Bits 4 a 7 de PORTD
DEFINE LCD_RSREG PORTB 'Puerto B seleccion de registro
DEFINE LCD_RSBIT 0 'RB0=RS de LCD
DEFINE LCD_RWREG PORTB 'Puerto B Lectura/Escritura
DEFINE LCD_RWBIT 1 'RB1=RW de LCD
DEFINE LCD_EREG PORTB 'Puerto B Habilitacionde LCD
DEFINE LCD_EBIT 2 'RB2=E de LCD
DEFINE LCD_COMMANDUS 2000 'Retardo ente comandos en us
DEFINE LCD_DATAUS 50 'Retardo entre datos en us
'Definiciones USART
DEFINE HSER_RCSTA 90h 'Habilitar registro de recepción
DEFINE HSER_TXSTA 20h 'Habilitar registro de transmisión
DEFINE HSER_BAUD 9600 '9600 baudios
dato VAR BYTE[16]
i VAR BYTE
loop1:
HSERIN [sTR dato\16] 'Espera 16 caracteres y guarda en dato
LCDOUT $FE,1 'Borrar LCD
LCDOUT $FE, $0C 'Primera fila, cursor off
FOR i=0 TO 15
LCDOUT dato[i] 'Enviar 16 caracteres ( en ASCII)
NEXT i
GOTO loop1
END
miércoles, 16 de marzo de 2011
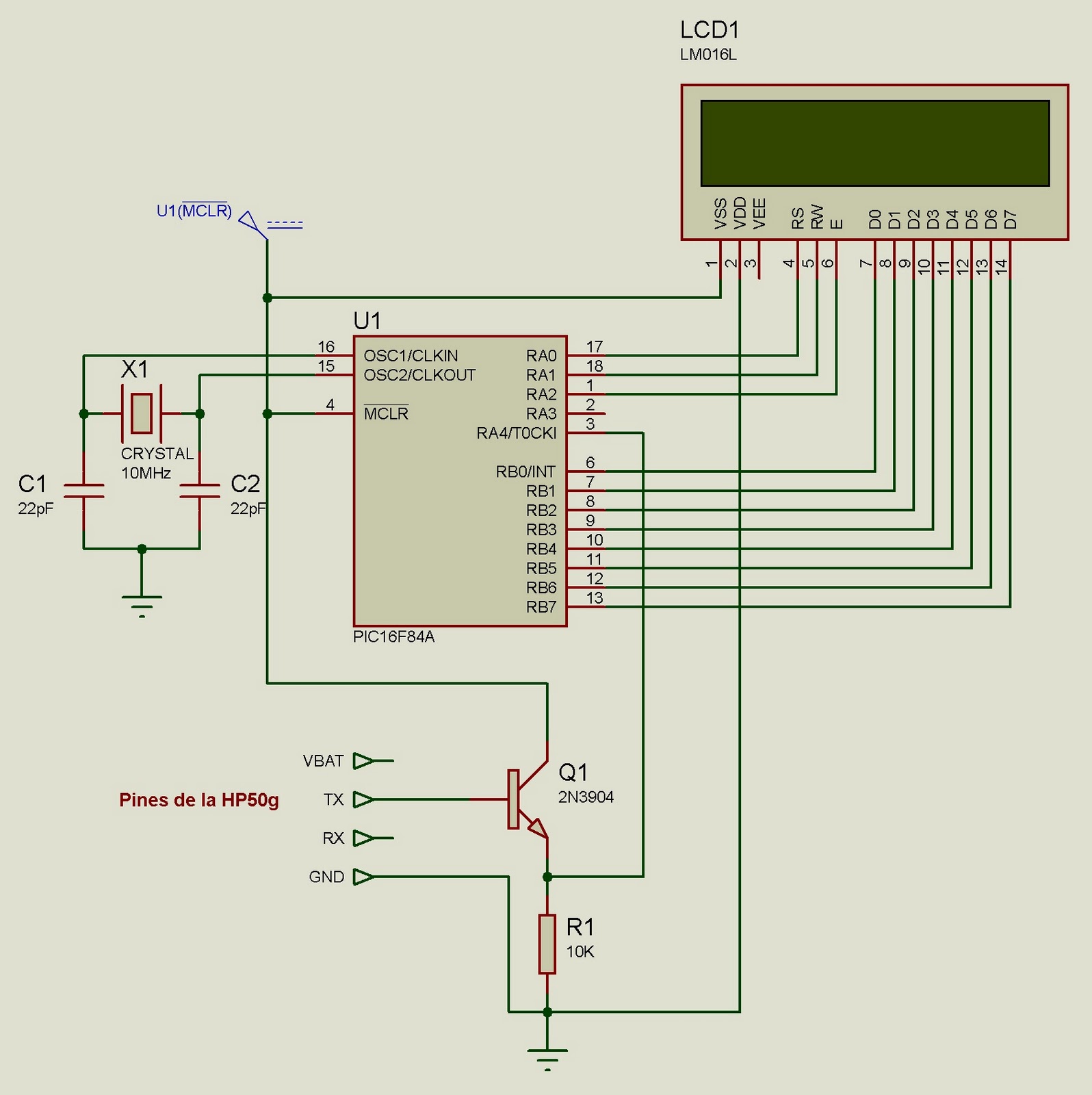
Envio de cadena de caracteres y visualización en LCD
Programa para PIC16F84A


1 10
FOR j
"CADENA A ENVIAR"
{":a:" {0 0} V}
INPUT
- Este programa recibe una cadena de 16 caracteres ASCII de la calculadora HP 50g y la muestra en un LCD con controlador Hitachi 44780.
- Se utiliza Direccionamiento Indirecto para guardar la cadena de caracteres en registros sucesivos a partir de la dirección 20h.
- Los datos en serie se reciben a 9600 baudios por el pin RA4.
- Según el siguiente diagrama de tiempos de envio de datos en serie:

- El programa espera a que se presente un "0" (bit START). Cuando esto ocurre se ejecuta una rutina que guarda los bits que llegan en serie, a partir del menos significativo, en la dirección de memoria al que apunta el registro FSR (Direccionamiento indirecto).
- Una vez recibidos los 8 bits, debidamente sincronizados a 9600 baudios mediante retardos, se ejecuta un retardo más a la espera del primer bit STOP (para evitar falsas lecturas de "0" que podría ser el 8 bit de datos).
- Se incrementa FSR para apuntar a la dirección sucesiva y se incrementa un contador de caracteres recibidos.
- Si ya se recibieron 16 caracteres se salta a la rutina que muestra la cadena en un LCD, una vez finalizada se repite el proceso nuevamente . Caso contrario se espera un nuevo "0" (bit START) para recibir el siguiente caracter.

{kind=link}
{kind=link}
- La cantidad de caracteres a recibir se puede modificar en el archivo .ASM (donde se indica).
- Opcional: para enviar caracteres desde la calculadora crear el siguiente programa que permite enviar 10 cadenas cada vez que se ejecuta. Escribir la cadena entre comillas (".....") cuando se solicite.
1 10
FOR j
"CADENA A ENVIAR"
{":a:" {0 0} V}
INPUT
OBJ→ 'a' STO a
9600 BAUD
XMIT
DROP
NEXT
'a' PURGE >>
Archivos .ASM y .HEX:
lunes, 14 de marzo de 2011
Envio de datos por puerto serie de calculadora HP 50g
Programa para PIC16F84A
Guardar en una variable.
Esquema de conexión:

El transistor 2N3904 es necesario como adaptador de nivel de tensión ya que la calculadora transmite en niveles CMOS (3.3 V).
Archivos .ASM y .HEX para PIC
Descargar
Se publicará mas información según avance.
- Programa que recibe datos del puerto serie de la HP 50g a 9600 baudios.
- La HP 50g envia caracteres ASCII por el puerto serie (Compatible con interfaz RS232, necesario adaptador de niveles de tensión) según el siguiente gráfico de tiempos:
- Se utiliza el bit START para generar una interrupción por el pin RB0/INT por flanco de bajada.
- La rutina de interrupción guarda los bits de datos recibidos en serie en el registro DATO.
- Se incluye rutinas de retardo para sincronizar a 9600 baudios.
- Una vez finalizada la recepción de datos se muestran los bits (en ASCII) mediante leds en los pines: RB7-RB4 y RA3 - RA0, nibles superior e inferior respectivamente.
- Para enviar un caracter ASCII de la calculadora HP 50g crear el siguiente programa:
Guardar en una variable.
- En modo RPN poner el caracter que se desea enviar en el nivel 1 de la pila entre " " y ejecutar el programa.
Esquema de conexión:

El transistor 2N3904 es necesario como adaptador de nivel de tensión ya que la calculadora transmite en niveles CMOS (3.3 V).
Archivos .ASM y .HEX para PIC
Descargar
Se publicará mas información según avance.
Suscribirse a:
Comentarios (Atom)